Calculating decibels:
The formulas in this section are in Microsoft Excel ® form.
- Calculating decibels for voltage ratios:
Value_dB = 20 * log10(voltage_ratio)
Procedure: Find the common logarithm of voltage_ratio. Then multiply by 20.
- Calculating decibels for power ratios:
Value_dB = 10 * log10(power_ratio)
Procedure: Find the common logarithm of power_ratio. Then multiply by 10.
- Finding voltage ratios from decibels:
voltage_ratio = 10 ^ (Value_dB /20)
Procedure: Divide Value_dB by 20. Then raise 10 to the power of the result.
- Finding power ratios from decibels:
power_ratio = 10 ^ (Value_dB /10)
Procedure: Divide Value_dB by 10. Then raise 10 to the power of the result.
- For a solution of simultaneous equations in n variables to be unique, n equations
are required.
In quadraphonics, this would be 4 equations in 4 unknowns - a discrete quadraphonic system.
- When a system of simultaneous equations in n variables has fewer than n equations,
the system normally has multiple solutions.
Such a system can have no solution. But such systems are not used in quadraphonics.
- Encoding matrix quadraphonics uses a system of 2 equations with n variables
(representing n input channels). There are 2 channels on the recording.
In quadraphonics, this would be 2 equations in 4 unknowns.
- Decoding matrix quadraphonics uses a system of n equations with 2 variables
(representing n output channels).
In quadraphonics, this would be 4 equations in 2 unknowns.
- The system of n equations in 2 variables is used to recover the n channels. But
because these systems of equations do not have a unique solution, there is crosstalk
between the channels.
But the coefficients of the two systems of equations are chosen by design to place the crosstalk where the designer wants it to be.
Modulations on the stereo record groove are defined by the RIAA (Recording Industry Association of America).
Here are the stereophonic groove modulations as defined by the RIAA:
- The stereophonic groove shall contain two channels of information recorded as orthogonal modulations of a single groove.
- The 45 degree-45 degree system is the standard. In this system the two mutually perpendicular axes of modulation shall be symmetrically disposed with respect to a normal to the disc surface.
- The right hand information channel, as viewed by the listener, shall appear as modulation of the outside wall of the groove.
- When equal in-phase signals are recorded in the two channels they shall result in lateral modulation of the stereophonic groove shall produce equal in-phase acoustical signals.
- The stereophonic groove contour shall be as recommended in RIAA Dimensional Standards for Disc Phonograph Records, Bulletin E 4.
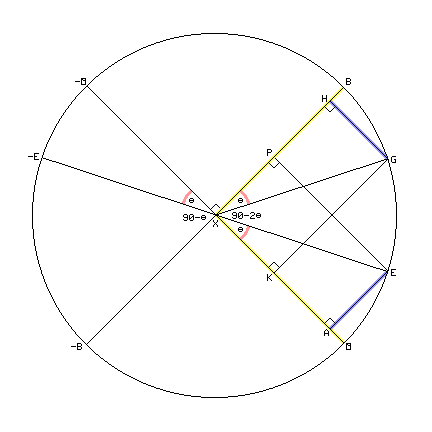
Stereo Groove Modulations
These modulations are as viewed from beyond the cartridge end of a normally mounted pickup arm:
- Left and right channels:
The left channel is recorded on the side of the groove closest to the spindle.
- Left channel modulations slope up to the right and down to the left at a 45° angle (cyan).The right channel is recorded on the side of the groove closest to the rim.
- Right channel modulations slope up to the left and down to the right at a 45° angle (red). - In-phase (center) channel and reversed-phase recording:
In-phase modulations are lateral (horizontal - olive). They emulate a monaural record.
Reversed phase modulations are vertical (violet).
- Circular modulations:
Clockwise motion (viewing the cartridge end of the tonearm) occurs when the left channel leads the right channel by 90° (black).
Anticlockwise motion (viewing the cartridge end of the tonearm) occurs when the left channel lags the right channel by 90° (brown).